군집화란?
[머신러닝] 군집화 (Clustering)
군집화(Clustering) [군집]군집은 비슷한 샘플을 클러스터 또는 비슷한 샘플의 그룹으로 할당하는 작업으로, 데이터 분석, 고객 분류, 추천 시스템, 검색 엔진, 이미지 분할, 준지도 학습, 차원 축소
puppy-foot-it.tistory.com
이전 내용
[머신러닝] 군집화: GMM
군집화란? [머신러닝] 군집화 (Clustering)군집화(Clustering) [군집]군집은 비슷한 샘플을 클러스터 또는 비슷한 샘플의 그룹으로 할당하는 작업으로, 데이터 분석, 고객 분류, 추천 시스템, 검색 엔
puppy-foot-it.tistory.com
DBSCAN
◆ DBSCAN(Density Based Spatial Clustering of Applications with Noise)
밀도 기반 군집화의 대표적인 알고리즘이며, 간단하고 직관적인 알고리즘으로 돼 있음에도 데이터의 분포가 기하학적으로 복잡한 데이터 세트에도 효과적인 군집화가 가능하다.
DBSCAN은 특정 공간 내에 데이터 밀도 차이를 기반 알고리즘으로 하고 있어서 복잡한 기하학적 분포도를 가진 데이터 세트에 대해서도 군집화를 잘 수행한다.
◆ DBSCAN을 구성하는 중요한 두 가지 파라미터
- 입실론(epsilon) 주변 영역: 개별 데이터를 중심으로 입실론 반경을 가지는 원형의 영역
- 최소 데이터 개수(min points): 개별 데이터의 입실론 주변 영역에 포함되는 타 데이터의 개수
※ 입실론(Epsilon): 개별 데이터를 중심으로 일정한 반경을 가진 원형의 영역을 나타내는 값. (반경을 나타내는 값) .
◆ 입실론 주변 영역 내에 포함되는 최소 데이터 개수를 충족시키는지 여부에 따른 데이터 포인트 정의
- 핵심 포인트(Core Point): 주변 영역 내에 최소 데이터 개수 이상의 타 데이터를 가지고 있을 경우의 해당 데이터
- 이웃 포인트(Neighbor Point): 주변 영역 내에 위치한 타 데이터
- 경계 포인트(Border Point): 주변 영역 내에 최소 데이터 개수 이상의 이웃 포인트를 가지고 있지 않지만 핵심 포인트를 이웃 포린트로 가지고 있는 데이터
- 잡음 포인트(Noise Point): 최소 데이터 개수 이상의 이웃 포인트를 가지고 있지 않으며, 핵심 포인트도 이웃 포인트로 가지고 있지 않는 데이터
DBSCAN은 입실론 주변 영역의 최소 데이터 개수를 포함하는 밀도 기준을 충족시키는 데이터인 핵심 포인트를 연결하면서 군집화를 구성하는 방식이다.
사이킷런은 DBSCAN 클래스를 통해 DBSCAN 알고리즘을 지원하며, 해당 클래스는 다음과 같은 주요한 초기화 파라미터를 가지고 있다.
- eps: 입실론 주변 영역의 반경
- min_samples: 핵심 포인트가 되기 위해 입실론 주변 영역 내에 포함돼야 할 데이터의 최소 개수 (자신의 데이터 포함)
DBSCAN 적용하기 (붓꽃 데이터 세트)
붓꽃 데이터 세트를 DataFrame으로 로딩하고, DBSCAN 클래스를 이용해 붓꽃 데이터 세트를 군집화
(일반적으로 eps 값으로 1 이하의 값을 설정한다)
from sklearn.datasets import load_iris
from sklearn.cluster import DBSCAN
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
%matplotlib inline
iris = load_iris()
feature_names = ['sepal_length', 'sepal_width', 'petal_length', 'petal_width']
# 데이터 핸들링을 위해 DataFrame 변환
irisDF = pd.DataFrame(data=iris.data, columns=feature_names)
irisDF['target'] = iris.target
dbscan = DBSCAN(eps=0.6, min_samples=8, metric='euclidean')
dbscan_labels = dbscan.fit_predict(iris.data)
irisDF['dbscan_cluster'] = dbscan_labels
irisDF['target'] = iris.target
iris_result = irisDF.groupby(['target'])['dbscan_cluster'].value_counts()
print(iris_result)
▶ 군집 레이블이 -1인 것은 노이즈에 속하는 군집을 의미한다.
Target 값의 유형이 3가지인데, 군집이 2개가 됐다고 군집화 효율이 떨어지는 것은 아니다.
DBSCAN은 군집의 개수를 알고리즘에 따라 자동으로 지정하므로 DBSCAN에서 군집의 개수를 지정하는 것은 무의미하다.
[PCA를 이용해 2개의 피처로 압축 변환한 뒤, 시각화]
DBSCAN으로 군집화 데이터 세트를 2차원 평면에서 표현하기 위해 PCA를 이용해 2개의 피처로 압축 변환한 뒤, 이전에 진행했던 visualize_cluster_plot() 함수를 이용해 시각화해 본다.
visualize_cluster_plot() 함수 인자로 사용하기 위해 irisDF의 'ftr1', 'frt2' 칼럼에 PCA 로 변한된 피처 데이터 세트를 입력한다.
def visualize_cluster_plot(clusterobj, dataframe, label_name, iscenter=True):
# 군집별 중심 위치: K-Means, Mean Shift 등
if iscenter:
centers = clusterobj.cluster_centers_
# Cluster 값 종류
unique_labels = np.unique(dataframe[label_name].values)
markers=['o', 's', '^', 'x', '*']
isNoise=False
for label in unique_labels:
# 군집별 데이터 프레임
label_cluster = dataframe[dataframe[label_name]==label]
if label == -1:
cluster_legend = 'Noise'
isNoise=True
else:
cluster_legend = 'Cluster '+str(label)
# 각 군집 시각화
plt.scatter(x=label_cluster['ftr1'], y=label_cluster['ftr2'], s=70,
edgecolor='k', marker=markers[label], label=cluster_legend)
# 군집별 중심 위치 시각화
if iscenter:
center_x_y = centers[label]
plt.scatter(x=center_x_y[0], y=center_x_y[1], s=250, color='white',
alpha=0.9, edgecolor='k', marker=markers[label])
plt.scatter(x=center_x_y[0], y=center_x_y[1], s=70, color='k',
edgecolor='k', marker='$%d$' % label)
if isNoise:
legend_loc='upper center'
else:
legend_loc='upper right'
plt.legend(loc=legend_loc)
plt.show()
from sklearn.decomposition import PCA
# 2차원으로 시각화하기 위해 PCA n_components=2 로 피처 데이터 세트 변환
pca = PCA(n_components=2, random_state=0)
pca_transformed = pca.fit_transform(iris.data)
# visualize_cluster_plot() 함수는 ftr1, ftr2 칼럼을 좌표에 표현하므로 PCA 변환값을 해당 칼럼으로 생성
irisDF['ftr1'] = pca_transformed[:, 0]
irisDF['ftr2'] = pca_transformed[:, 1]
visualize_cluster_plot(dbscan, irisDF, 'dbscan_cluster', iscenter=False)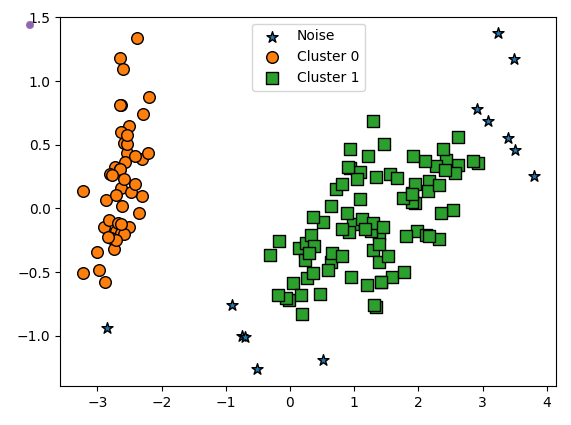
▶ '★' 로 표현된 값은 모두 노이즈이며, PCA로 2차원으로 표현하면 이상치인 노이즈 데이터가 명확히 드러난다.
DBSCAN을 적용할 때는 특정 군집 개수로 군집을 강제하지 않는 것이 좋으며, DBSCAN 알고리즘에 적절한 eps와 min_samples 파라미터를 통해 최적의 군집을 찾는 게 중요하다.
- eps의 값을 크게 하면 반경이 커져 포함하는 데이터가 많아지므로 노이즈 데이터 개수가 작아진다
- min_samples 를 크게 하면 주어진 반경 내에서 더 많은 데이터를 포함시켜야 하므로 노이즈 데이터 개수가 커지게 된다 (데이터 밀도가 더 커저야 하는데, 매우 촘촘한 데이터 분포가 아닌 경우 노이즈로 인식하기 때문)
[eps를 증가시켰을 경우 노이즈 데이터 변화 확인]
eps를 0.6에서 0.8로 증가시킨 후 시각화를 해 본다.
dbscan = DBSCAN(eps=0.8, min_samples=8, metric='euclidean')
dbscan_labels = dbscan.fit_predict(iris.data)
irisDF['dbscan_cluster'] = dbscan_labels
irisDF['target'] = iris.target
iris_result = irisDF.groupby(['target'])['dbscan_cluster'].value_counts()
print(iris_result)
visualize_cluster_plot(dbscan, irisDF, 'dbscan_cluster', iscenter=False)
▶ 노이즈 군집인 -1이 3개로 줄었다.
[min_samples를 증가시켰을 때의 변화 확인]
이번에는 eps 를 0.6으로 유지하고 min_samples를 16으로 늘려본 후 데이터 변화를 확인해 본다.
dbscan = DBSCAN(eps=0.6, min_samples=16, metric='euclidean')
dbscan_labels = dbscan.fit_predict(iris.data)
irisDF['dbscan_cluster'] = dbscan_labels
irisDF['target'] = iris.target
iris_result = irisDF.groupby(['target'])['dbscan_cluster'].value_counts()
print(iris_result)
visualize_cluster_plot(dbscan, irisDF, 'dbscan_cluster', iscenter=False)
▶ 노이즈 데이터가 기존보다 많이 증가하였다.
DBSCAN 적용하기 - make_circles() 데이터 세트
[복잡한 기하학적 분포를 가지는 데이터 세트에서 DBSCAN과 타 알고리즘 비교]
make_circles() 함수를 이용해 내부 원과 외부 원 혀태로 돼 있는 2차원 데이터 세트를 만든다.
make_circles() 함수는
- 오직 2개의 피처만을 생성하므로 별도의 피처 개수를 지정할 필요가 없음.
- 파라미터 noise: 노이즈 데이터 세트의 비율
- 파라미터 factor: 외부 원과 내부 원의 scale 비율
from sklearn.datasets import make_circles
X, y = make_circles(n_samples=1000, shuffle=True, noise=0.05, random_state=0, factor=0.5)
clusterDF = pd.DataFrame(data=X, columns=['ftr1', 'ftr2'])
clusterDF['target'] = y
visualize_cluster_plot(None, clusterDF, 'target', iscenter=False)
[K-평균의 데이터 세트 군집화 확인]
# KMeans로 make_circles() 데이터 세트 군집화 수행
from sklearn.cluster import KMeans
kmeans = KMeans(n_clusters=2, max_iter=1000, random_state=0)
kmeans_labels = kmeans.fit_predict(X)
clusterDF['kmeans_cluster'] = kmeans_labels
visualize_cluster_plot(kmeans, clusterDF, 'kmeans_cluster', iscenter=True)
▶ 거리 기반 군집화로는 위와 같이 데이터가 특정한 형태로 지속해서 이어지는 부분을 찾아내기 어렵다.
[GMM 의 데이터 세트 군집화 확인]
# GMM으로 make_circles() 데이터 세트 군집화 수행
from sklearn.mixture import GaussianMixture
gmm = GaussianMixture(n_components=2, random_state=0)
gmm_labels = gmm.fit(X).predict(X)
clusterDF['gmm_cluster'] = gmm_labels
visualize_cluster_plot(gmm, clusterDF, 'gmm_cluster', iscenter=False)
▶ 내부와 외부의 원형으로 구성된 복잡한 형태의 데이터 세트에서는 군집화가 원하는 방향으로 되지 않는다.
[DBSCAN 군집화]
# DBSCAN 으로 make_circles() 데이터 세트 군집화 수행
from sklearn.cluster import DBSCAN
dbscan = DBSCAN(eps=0.2, min_samples=10, metric='euclidean')
dbscan_labels = dbscan.fit_predict(X)
clusterDF['dbscan_cluster'] = dbscan_labels
visualize_cluster_plot(dbscan, clusterDF, 'dbscan_cluster', iscenter=False)
▶ 원하는 방향으로 정확히 군집화가 되었다.
다음 내용
[머신러닝] 군집화: 실습 - 고객 세그먼테이션
군집화란? [머신러닝] 군집화 (Clustering)군집화(Clustering) [군집]군집은 비슷한 샘플을 클러스터 또는 비슷한 샘플의 그룹으로 할당하는 작업으로, 데이터 분석, 고객 분류, 추천 시스템, 검색 엔
puppy-foot-it.tistory.com
[출처]
파이썬 머신러닝 완벽 가이드
'[파이썬 Projects] > <파이썬 머신러닝>' 카테고리의 다른 글
| [머신러닝] 텍스트 분석 (0) | 2024.10.28 |
|---|---|
| [머신러닝] 군집화: 실습 - 고객 세그먼테이션 (1) | 2024.10.28 |
| [머신러닝] 군집화: GMM (0) | 2024.10.27 |
| [머신러닝] 군집화: 평균 이동 (0) | 2024.10.25 |
| [머신러닝] 군집화: 군집 평가 (3) | 2024.10.25 |



